O robot móvel é constituído por uma plataforma circular com tracção disponibilizada por dois pequenos motores DC. O controlo de direcção é efectuado por variação da velocidade de cada uma das rodas motrizes (modo diferencial).

Configuração do robot
O robot possui uma placa central de processamento com um microcontrolador da série 8051 (e opcionalmente uma FPGA). Esta placa é expansivel com módulos externos para diferentes funções (interface com o utilizador, interface de sensores, controlo de motores, comunicações, etc).
O kit base é constituído pela estrutura mecânica do robot (com os motores e bateria), placa central de processamento, placa de controlo de potência dos motores (ponte H), placa de interface com sensores e um conjunto de sensores base (detecção de obstaculos e seguimento de linha).

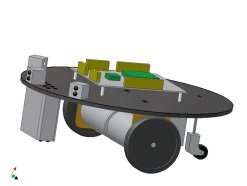
Protótipo do Robot.



Robot para competição Rescue.


Protótipo de robot para competição Futebol Júnior.







