Com o teu micro robot podes aumentar o teu conhecimento em inúmeras àreas bem como tópicos de estudo curricular do teu plano de ensino (secundário, profissional ou superior).
Aqui podes encontrar material de apoio ao estudo de diferentes matérias relacionadas com o teu robot bem como exemplos e casos de aplicação.
Brevemente estarão disponíveis conteúdos ....
Electrónica Digital
Programação
I. A.
Electrónica Analógica
1 - Ponte H
A ponte H é uma unidade que permite o controlo dos motores a partir de sinais, normalmente gerados por um microcontrolador.
Os sinais de saída dos microcontroladores não têm níveis de tensão adequados nem a capacidade de fornecer a corrente necessária para excitar um motor que esteja ligado directamente aos seus terminais. Daí a necessidade de uma unidade de potência que possa fornecer os níveis necessários.
1.1 - Controlo de velocidade de um motor DC
A velocidade de um motor pode ser controlada através da sua tensão (corrente) de entrada. No entanto, para evitar sobreaquecimentos nos componentes, em vez de um sinal contínuo é usado um sinal PWM (Pulse Width Modulation) onde a largura dos impulsos controla a potência fornecida ao motor e por sua vez a velocidade de rotação. A velocidade do motor varia proporcionalmente à área debaixo da porção positiva de cada período.
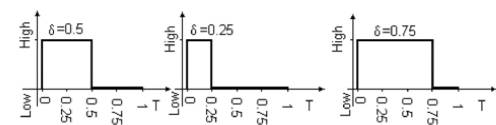
Fig. 1 - Sinal PWM
O facto de muitos microcontroladores possuírem este tipo de canal, torna bastante simples a sua utilização. Por outro lado, são reduzidas as perdas térmicas nos componentes, pois nem sempre se têm uma tensão aplicada.
1.2 - Controlo de Direcção
A inversão do sentido de rotação dos motores pode ser conseguida invertendo a tensão aplicada. A solução clássica para esta situação é o uso de um esquema do tipo Ponte H, tal como é exemplificado na figura seguinte. O nome provém do aspecto da sua configuração básica. O sinal de PWM pode ser aplicado no terminal Enable.
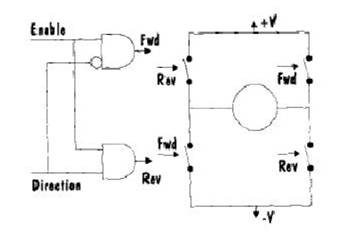
Fig. 2 - Esquema eléctrico da Ponte H
Fisíca
1 - Ultrasons
O Sonar é um sistema que ondas sonoras transmitidas e reflectidas, para detectar e localizar objectos ou medir distâncias. Tem sido utilizado em submarinos e detecção de minas, detecção de profundidade, pesca comercial, mergulho e comunicação no mar. O dispositivo de Sonar envia uma onda ultrasónica e depois fica à espera dos ecos, a informação sonora é visualizada pelo operador humano através de um monitor.
Lewis Nixon inventou o primeiro dispositivo de escuta de Sonar em 1906, com o objectivo de detectar icebergs. O interesse no Sonar, durante a Primeira Guerra Mundial, aumentou com a necessidade de detectar submarinos. Em 1915, Paul Langévin inventou o primeiro tipo de Sonar para detecção de submarinos “ecolocalização para detecção de submarinos” utilizando as propriedades piezoeléctricas do quartzo. Foi tarde de mais para ajudar nos esforços de guerra, no entanto o trabalho de Langévin marcou o design futuro do sonar.
Os primeiros Sonares eram dispositivos passivos de escuta de ecos, não eram enviados sinais. Por volta de 1918, já a Grã-bretanha e Estados Unidos tinham construído sistemas activos, nos sistemas de Sonar activos os sinais são ambos enviados e recebidos. Sistemas acústicos de comunicação são dispositivos de Sonar em que o projector de ondas sonoras e o receptor estão presentes em ambos os extremos da linha de comunicação. A invenção do transdutor acústico e projectores acústicos eficientes tornou possível, formas de Sonar mais avançadas.
A palavra Sonar é um termo Americano, inicialmente utilizado na Segunda Guerra Mundial, é um acrónimo de SOund, NAvigation and Ranging. Os Britânicos chamavam o Sonar de, ASDICS, que vem de Anti-Submarine Detection Investigation Committee. Desenvolvimentos posteriores do Sonar incluíram o detector de profundidade, rapid-scanning Sonar, side-scan Sonar, e o WPESS (within-pulseectronic-sector-scanning) Sonar.
Uma distinção importante dentro dos sonares é entre sonares activos e passivos. Sendo que sonar activo cria uma onda sonora, que é frequente ser chamado de “ping”, e depois fica à escuta da reflexão da onda sonora. A onda pode ter uma frequência constante ou variável. Se for de frequência variável, o receptor compara a frequência da reflexão com a frequência variável do emissor. A melhoria do ganho de processamento resultante permite ao receptor tirar a mesma informação de uma onda sonora de menor frequência mas com a mesma potência total. Em geral, sonares activos de longa distância utilizam frequências menores. Para medir a distância de um objecto, medimos o tempo entre a emissão e a recepção da onda sonora.
Sonares passivos escutam sem transmitir. São principalmente para uso militar (embora alguns são para uso científico). Sistemas de sonar passivo têm normalmente uma grande base de dados de som. Um computador ligado ao sistema de sonar passivo utiliza esta base de dados para identificar classes de navios, acções (por exemplo velocidade de um navio, ou o tipo de arma lançada), e até navios particulares.
Matemática