| |
|
|
Arquivo de Hardware Antigo
| Placa de Potência |
|
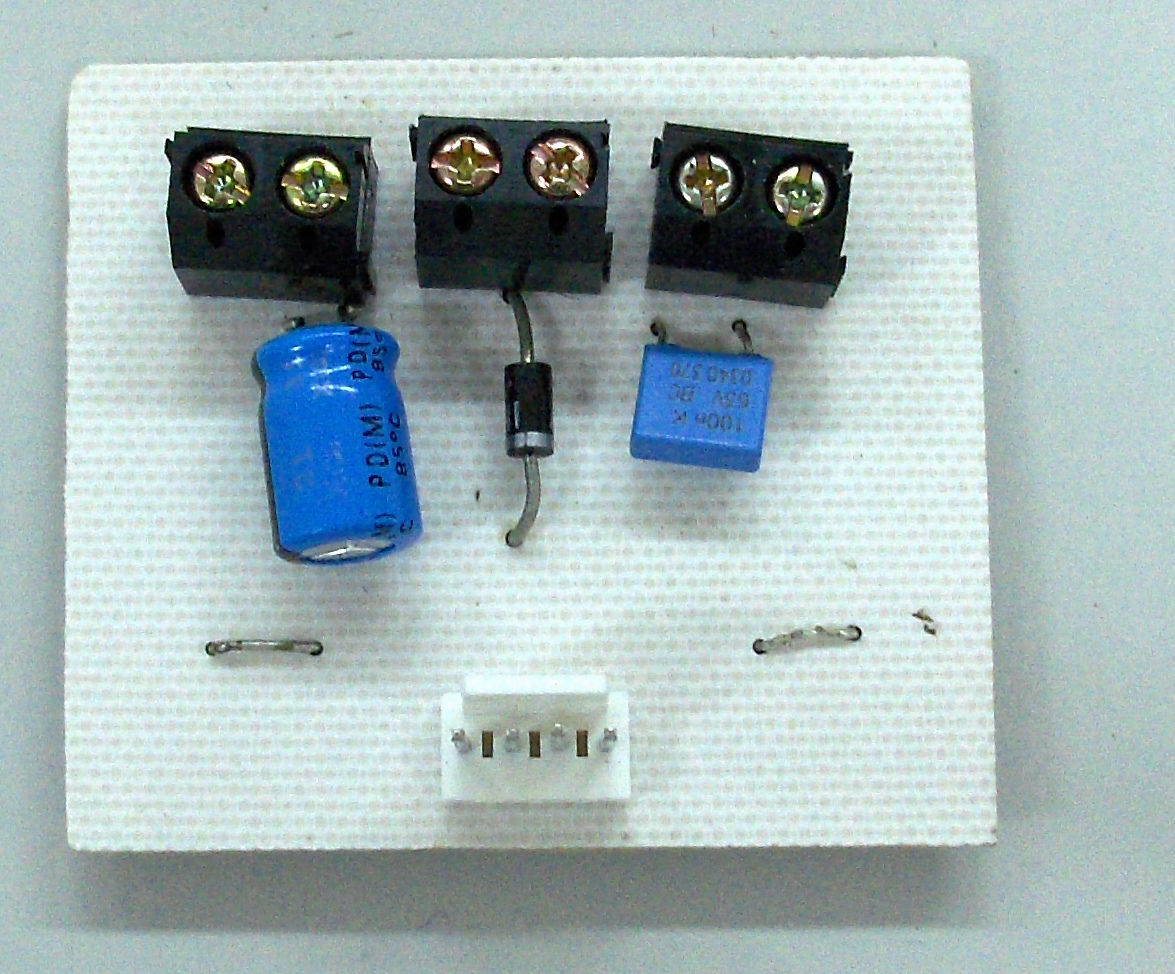
| Componentes utilizados: |
| 2 |
|
Pontes H |
TPIC0107b |
| 1 |
|
Díodo |
1N4007 |
| 1 |
|
Condensador de 100nF |
|
| 1 |
|
Condensador electrolitico de 100uF |
|
| |
|
|
|
|
|
|
|
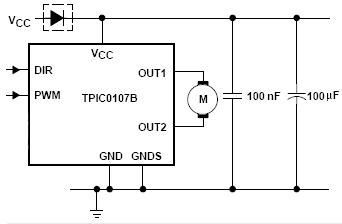
A placa de potência tem a unidade de potência do robot que faz uso de dois TPIC0107B da Texas Instruments, em que cada um deles controla um motor. É assim possível fazer o controlo do sentido de rotação (DIR) e da velocidade do motor (PWM). O esquema de ligações dos TPIC0107B é o esquema abaixo.
|
| Documentação relacionada |
| Motor Aprender: Igarashi DC Geared Motor 33G/N2738-XXX-xxxx |
| |
|
| Detecção Parede/Obstáculos |
|
| Componentes utilizados: |
| 1 |
Sonar |
SFR04 |
|
 |
 |
| 1 |
Sonar |
SFR08 |
|
| 1 |
Sonar |
SFR10 |
| |
 |
|
|
1 - Introdução
Para detectar a parede ou obstáculos vamos utilizar um ou mais sonares. O sonar necessita que lhe seja dado um sinal (Trigger) para começar a funcionar, quando o sinal de ultrasons encontra um objecto é reflectido (um dos grandes problemas dos sonares é que se a superfície encontrada pelo sinal ultrasónico tiver um posicionamento tal que o sinal seja reflectido para longe do sonar, o objecto não é detectado) e retorna ao sonar sendo nessa altura disparado um sinal de Eco. Da diferença entre o disparo do sonar (Trigger) e o Eco e sabendo nós que a onda se vai transmitir à velocidade do som e tendo em conta, que a onda percorre a distância que pretendemos medir, duas vezes (uma até ao objecto e outra de retorno até ao sonar); a distância que pretendemos calcular será dada pela fórmula:
Distância = (Tempo X Velocidade do som)/2 |
|
2 - Sonar SRF04
2.1 - Características do sonar SRF04
| Tensão |
- 5v |
| Corrente |
- 30mA Tip. 50mA Max. |
| Frequência |
- 40KHz |
| Distância Max. |
- 3 m |
| Distância Min. |
- 3 cm |
| Sensibilidade |
- Detecta um cabo de vassoura com 3cm de diâmetro, a mais de 2m de distância |
| Disparo (Trigger) |
- 10uS Min. nível TTL |
| Pulso de eco |
- Sinal TTL positivo, proporcional à distância ao obstáculo |
| Dimensões |
- 43mm x 20mm x 17mm |
2.2 - Principio de funcionamento do SRF04
O SRF04 é controlado por um impulso de nível lógico 1, com a duração de 10uS.
Após receber este impulso de disparo, o SRF04 envia um sinal acústico ultrasónico
e coloca a linha de eco no nível lógico 1, ficando de seguida à espera pelo sinal
acústico do eco. Assim que o eco é recebido, o SRF04 coloca a linha de eco
novamente a 0. O microcontrolador pode ser facilmente programado para medir o
tempo que o eco demorou a ser detectado, isto é, o tempo que a linha de eco
esteve a 1, e dessa forma calcular a distância a que se encontra o obstáculo que
provocou o eco. O diagrama temporal da figura 1 ilustra o que se acabou de dizer. |
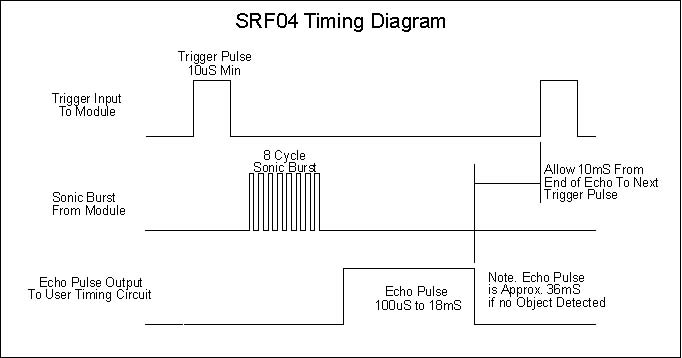
Figura 1 - Diagrama Temporal do SFR04
Como se pode perceber da figura 2, a dispersão do sinal
acústico não é uniforme para todo o espaço, e apesar do sonar SRF04 trabalhar com um ângulo de dispersão de 90º a sua precisão melhora consideravelmente se for diminuído o ângulo para o qual se pretende que seja efectivada a detecção para um ângulo de 45º de dispersão. Caso se pretenda um ângulo de detecção superior a 70º uma boa politica seria implementar um sistema mecânico que permita que o sonar rode, ou alternativamente, a utilização de vários sonares SRF04 com posicionamentos de forma a permitir uma detecção com uma maior precisão.
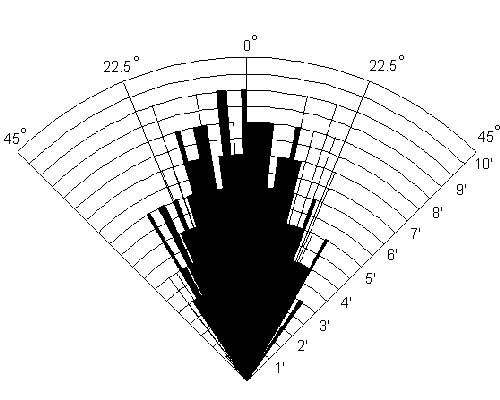
Figura 2 - Padrão de dispersão do sinal ultrasónico do sonar SRF04
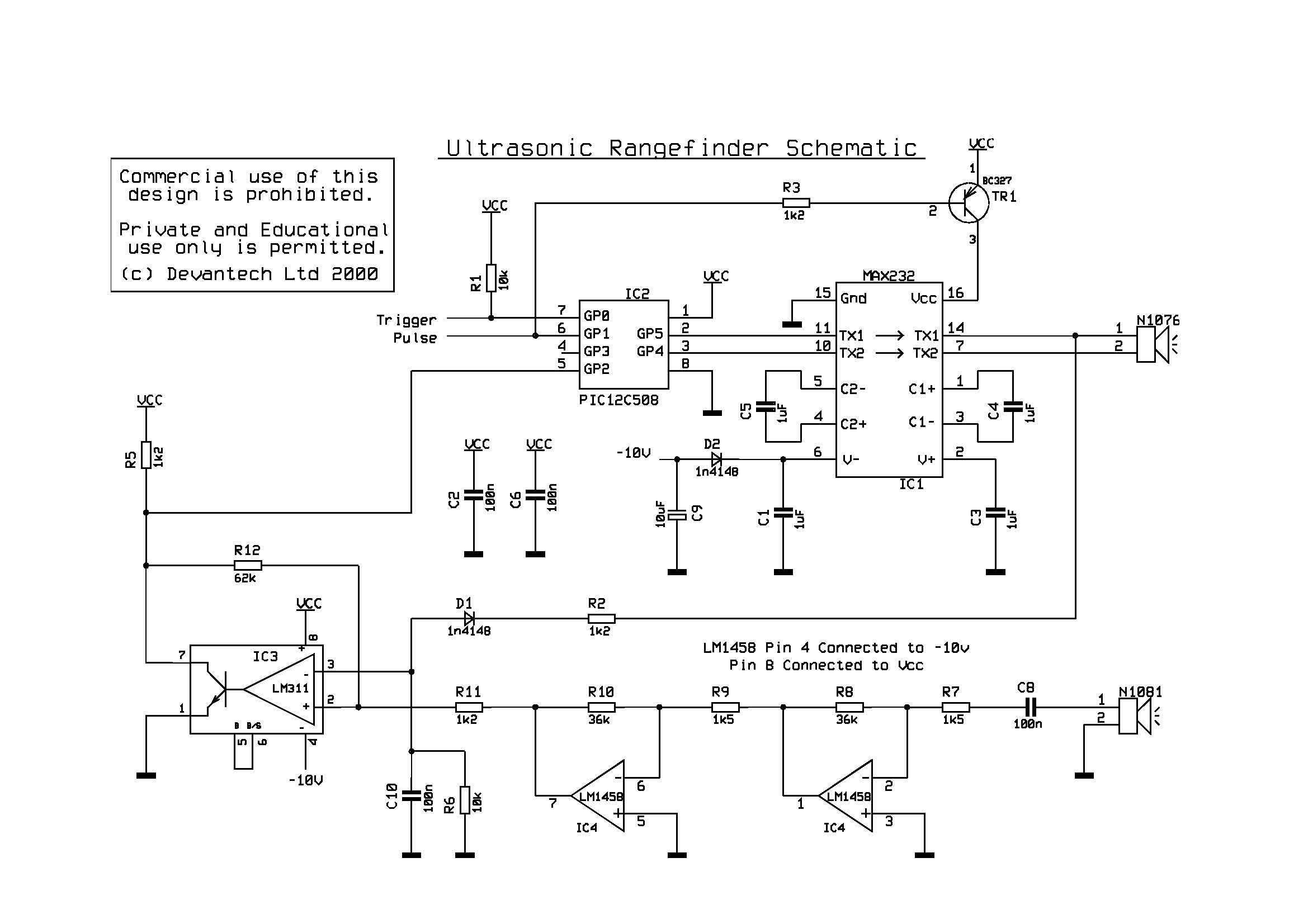
A figura 3 mostra o esquema do SRF04.
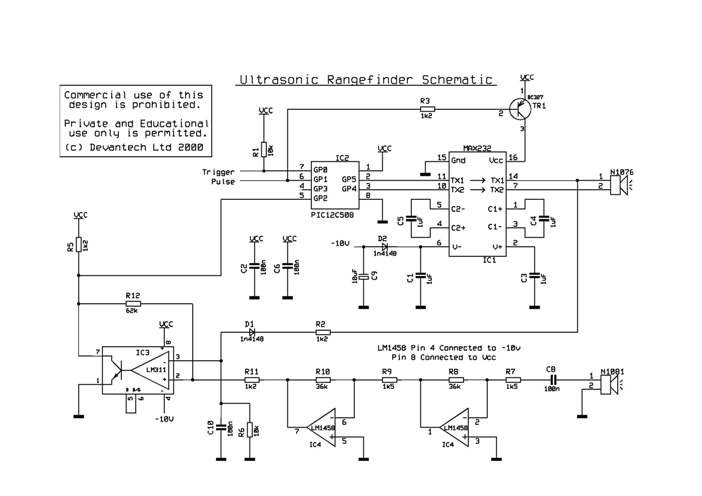
Figura 3 - Esquema do SFR04
|
3 - Sonar SRF08/SRF10
3.1 - Características do sonar SRF08/SRF10
| Tensão |
- 5v |
| Corrente |
- 30mA Tip. 275mA Max. |
| Frequência |
- 40KHz |
| Distância Max. |
- 6 m |
| Distância Min. |
- 3 cm |
| Sensibilidade |
- Detecta um cabo de vassoura com 3cm de diâmetro, a mais de 2m de distância |
| Dimensões |
- 43mm x 20mm x 17mm |
|
| Documentação relacionada |
Sonar SRF04: srf04_sonar_schematic.pdf srf04_pinout.pdf srf04_timing_diagram.pdf R93-SRF04p.pdf
Sonar SRF08: srf08_ultra_sonic_range_finder.pdf
Sonar SRF10: srt10tech.pdf |
| |
|
| |
|
|







{kind=link}