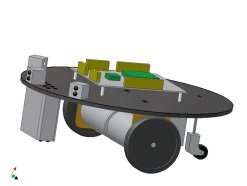
The robot it's constituted by a circular platform with traction given by two DC motors. The directional control is given by the rotation speed difference of the two motors (differential mode).

Robot Configuration
The robot have a central processing board with a microcontroller of the 8051 series (and optional one FPGA). This board it's expansible with external modules for different functions (user interface, sensors interface, motors control, communications, etc).
The base kit it's constituted by the mechanic structure of the robot (with the motors and battery), central processing board, motors power control board (H-bridge), sensors interface board and a set of base sensors (obstacle detection and line trace).

Robot Prototype.



Rescue robot.


Junior soccer robot prototype.




