| Descrição da arquitectura do hardware do Robot |
A arquitectura do hardware do robot é constituída basicamente pelos seguintes blocos: alimentação, computador, sensores, actuadores e comunicação. Na figura 1 é possível visualizar a interligação entre os blocos, de forma a constituir a arquitectura do hardware:
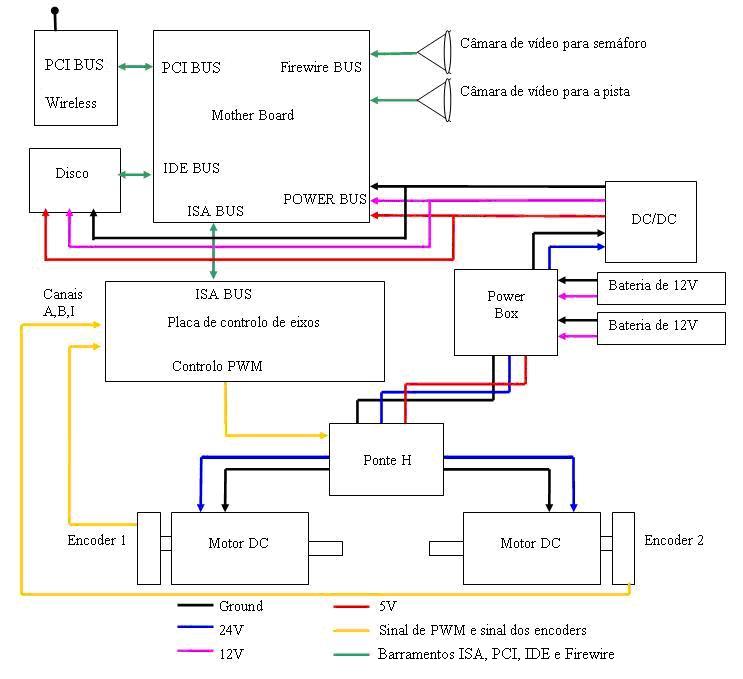
Como ilustra a figura anterior, os vários blocos referidos anteriormente são constituídos pelo hardware que passo a descrever de seguida. |
| |
|
| 1 - Placa de controlo de Eixos |
| |
|
É essencialmente uma placa projectada para o controlo de eixos de um robot. Tem como base dois circuitos integrados altamente versáteis, de fácil e rápida configuração, sendo eles:
- Microcontrolador P89C51RD2 , que entre outras características ressalta a de que não é necessário qualquer tipo de programador especial, pois é programável directamente pela porta série de um PC, onde esteja instalado o software adequado.
- FPGA FLEX10 K10LC84-4 , onde a principal característica é, a alta densidade, contendo 10000 portas lógicas.
O microcontrolador tem acesso à FPGA por Portos ou Xdata. Esta placa tem a possibilidade de comunicação de 8 bits, por barramento ISA - formato PC/104. Tem disponíveis quase todos os pinos de I/O, tanto do micro como da FPGA, por meio de fichas de 14 e 20 pinos, assim como a ficha da stack PC/104. Tem um oscilador de 20 MHz e a possibilidade de interrupção externa do microcontrolador.
A principal função desta placa é fazer o controlo do veículo, partindo da informação de posicionamento proveniente dos encoders, comunica com o PC (onde é processada a toda a informação dos encoders e câmara), recebendo depois valores de velocidade e gerando PWMs para as Pontes H.
Figura 2 - Diagrama de blocos da Placa de Eixos |
| |
|
| 2 - Amplificadores de potência |
|
|
| Os amplificadores de potência têm como finalidade o fornecimento adequado de energia aos motores, funcionando como drives de potência. São constituídos por duas pontes H, capazes de serem comandos pela Placa de Eixos através da utilização de impulsos PWMs (Pulse With Modelation), os quais são transformados em níveis de tensão a fornecer aos motores. |
| |
|
| 3 - Placa de Distribuição & Protecção |
|
|
| A Placa de Distribuição & Protecção , também chamada de Power Box faz a distribuição de energia para o restante hardware. Outra função desta placa é a protecção contra sobrecargas. Recebe a energia vindo das baterias, sendo depois então distribuída. |
| |
|
| 4 - Câmaras |
|
|
| A câmara digital USB utilizada foi o modelo PCVC740K da Philips, devido ao facto de apresentar uma qualidade de imagem superior à concorrência. O framerate máximo suportado pela câmara à resolução 640x480 pixeis é de 30fps. |
|
|
| A câmara digital Firewire utilizada foi o modelo Orange Micro iBOT Pro. O framerate máximo suportado pela câmara à resolução 640x480 pixeis é de 30fps. |
|
|
| A câmara digital Firewire utilizada foi o modelo Unibrain Fire-i. O framerate máximo suportado pela câmara à resolução 640x480 pixeis é de 30fps. |
| |
|
| 5 - Computador |
|
|
O computador utilizado é composto por:
- mother-board IPC NOVA 7896FW (SpeedRunner)
- Disco rigido de portatil de capacidade 40GB (SpeedRunner)
- Processador P3 Celeron a 1.1GHZ
|
- mother-board Ibase MB820 (BigRunner)
- Disco rigido de portatil de capacidade 40GB (BigRunner)
- Processador P4 a 3Ghz
|
| |
|
| 6 - Conversor DC/DC |
| |
|
| O conversor DC/DC tem como principal função alimentar da mother-board , do disco rigido com as esperadas tensões de 5V e 12V. |
| |
|
| 7 - Wireless |
|
|
| O ligação sem fios (Wireless) dos robots é feita utilizando placas SITECOM WL-115 de 54MB. |
| |
|
| 8 - Motores DC |
 |
 |
| Os motores de corrente contínua utilizados no robot SpeedRunner são os PITTMAN GM9236C34-R2. Estes motores já possuem caixa de desmutiplicação de 5,9. Estes motores têm a particularidade de possuir encoders opticos, para o caso estes são de 3 canais e resolução de 512 ticks por revolução do disco óptico. |
Os motores de corrente contínua utilizados no robot BigRunner são os Maxon. Estes motores já possuem caixa de desmutiplicação de xx. Estes motores têm a particularidade de possuir encoders opticos, para o caso estes são de xx canais e resolução de xxx ticks por revolução do disco óptico. |
| |
|
| 9 - Monitor TFT |
|
|
| Para ajudar na visualização do estado do robot, foi adicionado um monitor TFT Innovatek IN-007VG 7''. |
| |
|